

Research Article | DOI: https://doi.org/10.31579/ 2834-5142 /117
Miniature Magnetic Robot for Fast Dissolution of Kidney Stones: A Novel Preclinical Therapeutic Strategy
1Head of Marketing and sales, Riggs Pharmaceuticals, Karachi, Department of Pharmacy, University of Karachi, Pakistan
2FCPS fellow college of Physician and surgeon, Assistant professor, Department of Pathology, Dow University of Health Sciences
3Prof of pharmaceutical chemistry, Faculty of Pharmacy, SBB Dewan university, Karachi, Pakistan
4GD Pharmaceutical Inc., OPJS University, Rajasthan.
*Corresponding Author: Rehan Haider, PhD Head of Marketing and sales, Riggs Pharmaceuticals, Karachi; Department of Pharmacy, University of Karachi, Pakistan
Citation: Rehan Haider, Hina Abbas, Shabana Naz Shah, Geetha Kumari Das, (2026), Miniature Magnetic Robot for Fast Dissolution of Kidney Stones: A Novel Preclinical Therapeutic Strategy, International Journal of Clinical Nephrology, 5(1) DOI:10.31579/ 2834-5142 /117
Copyright: © 2026, Rehan Haider. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received: 01 January 2026 | Accepted: 14 January 2026 | Published: 30 January 2026
Keywords: kidney stones; magnetic microrobot; minimally invasive therapy; calcium oxalate; biomedical
Abstract
Kidney stone disease has remained a common urological problem that poses a high morbidity, recurrence, and disease-related healthcare burden. Traditional approaches used in the treatment of kidney stones include extracorporeal shock wave lithotripsy, ureteroscopy, and percutaneous nephrolithotomy. Even though these approaches have proved effective in stone clearance, they are associated with injury to tissues, infection, and incomplete clearance. Recent innovations in biomedical robots and nanotechnologies have opened a diverse range of applications in designing minimally invasive targeted therapy systems. This paper discusses the experimental development of a miniature magnetic robot designed to facilitate the rapid dissolution of kidney stones.
The design of this microrobot employs biocompatible magnetic composites that are magnetically guided from outside. It facilitates precise movement within fluidic environments that mimic a human urinary tract system. This robot has been designed in such a way that it mechanically agitates stone surfaces along with a localized treatment of stone-dissolving chemicals in order to optimize dissolution kinetics. In vitro experiments were performed on artificial stones composed of calcium oxalate under physiological conditions.
The results revealed a significant increase in dissolution rates of the stone as compared to the passive dissolution method (p < 0.05). The robot moved in a controlled manner and interacted with the surface without generating excessive debris. These results indicate that magnetically guided microrobots could be an emerging alternative to current treatments for stones in the kidneys.
In summary, this preclinical study finds that the use of miniature magnetic robots could become an efficient and targeted minimally invasive treatment method for the treatment of kidney stones. Future research in veterinary models and early clinical testing would be recommended.
Introduction
Kidney metal ailment has long been an accepted urinary structure disorder and has affected about 10% to 15% of the world’s population in current periods by way of changing diet habits and behaviors [1,2]. Among miscellaneous types of metals, those of calcium oxalate are the most common and more fixed to catch spontaneously annulled [3]. Kidney crystal establishment is still a significant financial burden on the health management system [4].
Current modalities secondhand in analysis contain extracorporeal shock wave lithotripsy, ureteroscopy, and percutaneous nephrolithotomy [5]. While these approaches have been established to work well, they have been obtrusive, chief to certain confusions, such as hematuria, contaminations, ureteral damage, and retained grains [6]. Also, the mechanical process leaves behind fragments that bring about repetition [7].
Currently, advances in biomedical architecture have revealed microrobotic wholes that may be hopeful in the use of minimally invasive healing processes [8]. Magnetically compelled microrobots make use of the strength expected wirelessly reserved, accurately guide along a route, often over water, and can intensely penetrate organic tissues utilizing an extrinsic magnetic field of currents [9,10]. These robots have proved promising in conditions of point-in-a-direction drug delivery, thrombolysis, and healing uses [11,12] but have not yet been investigated in kind crystal treatment.
The authors suggest a drawing machine that has the ability to energetically aid sort stone death, establishing the law of mechanical shaking linked accompanying the interplay between the metal meaning and the synthetic agent. The aim is the dispatch of death with optimum protection of fabric purity [13].
Literature Review
Epidemiological research has openly proved predominance and recurrence rates of kind metals [1, 2]. Medical destruction treatments are shown to be useless for calcium gems on account of poor backlash rates and lack of surface approachability [3, 14]. This is chiefly why interventional plans are mainly used [5].
There has been a huge development in research concerning microrobotics in the current decade. The use of untethered microrobots in minimally obtrusive care was accentuated by Nelson and others. In a study [8], followed by Sitti and others, the one concentrated on the ability to guide along a route, often over water in an organic atmosphere with greater accuracy, utilizing microrobots [9]. Magnetically regulated microrobots are beneficial be necessary their biocompatibility and control efficiencies in outside environments [10, 15].
Several studies have again shown that data processing machine-scale mechanical shaking considerably boosts chemical destruction for non-organic substrates [16]. At the same time, magnetically regulated microrobots have been used favorably for target drug transfer and breaking biofilms under physiological environments [11,17]. They confirmed that micromotors can be secondhand harmlessly outside, encouraging toxicity under in vivo conditions [18].
Despite these improvements, unusually few studies have resolved the integration of microrobotic motion accompanying the planning of separating kidney rocks. This work mainly focused on fragmentation accompanying the disregard of disintegration earlier [13].
Research Methodology
Study Design
An exploratory study was conducted on lab calcium oxalate stones, which are very complementary to original renal stones, amounting to calcium oxalate crystals [14,16].
Microrobot Technology
For this purpose, a tiny-drawing robot was favorably grown by merging a biocompatible polymer matrix accompanying iron group of chemical elements nanoparticles following standard processes for making biomedical microrobots [12, 19]. The developed tiny-drawing machine was around 1.2mm in height, furthering allure talent to pass through narrow fluid channels [15].
Experimental Setup
A fluid model planned to simulate the environments in the urinary tracts was previously established planned artificial models [20]. The electromagnetic coils were outside to supply the robot accompanying alternating and sloped magnetic fields to enable the machine to navigate and control [9,21]. The citrate-based separation power was complicated to facilitate the synthetic deterioration of the surfaces of the gravels [3].
Outcome MeasuresCritical
The basic outcomes were the portion of grain bulk reduction, separation opportunity, and changes in the surface makeup, which were resolved utilizing ocular microscopy [16].
Statistical Analysis A statistical study was done utilizing SPSS form 26. The all-inclusive data is presented as mean ± standard deviation. The liberated t-test was utilized to decide differences in the rates of rupture between done or made by machine-assisted groups and control groups, as seen in exploratory works of biomedicine [22]. A worth of p < 0>
Results
The electronic-helped destruction yielded an average decline of grain bulk of 62.4% ± 6.8 within 30 minutes, as opposed to 28.7% ± 5.1 manual decline in the control group, and this was meaningful at p < 0>Parameter Specification Length 1.2 mm Diameter 0.4 mm Material composition Biocompatible polymer with iron oxide nanoparticles Magnetic responsiveness Yes (externally actuated) Mode of locomotion Rotational and translational magnetic actuation Operating medium Physiological saline Dissolution agent Citrate-based solution Structural stability Maintained throughout experiments
Table 1: Physical and Functional Characteristics of the Miniature Magnetic Robot
Table 1 summarizes the design specifications and functional characteristics of the miniature magnetic robot used for kidney stone dissolution experiments, consistent with previously reported biomedical microrobot designs [9,12,19].
| Outcome measure | Control group (Chemical only) | Robotic-assisted group | p-value |
|---|---|---|---|
| Mean stone mass reduction (%) | 28.7 ± 5.1 | 62.4 ± 6.8 | <0> |
| Dissolution time (minutes) | 60 | 30 | <0> |
| Surface erosion uniformity | Low | High | — |
| Residual fragment formation | Present | Minimal | — |
Table 2: Comparison of Stone Dissolution Outcomes Between Study Groups
Table 2 compares dissolution efficiency between passive chemical treatment and robotic-assisted dissolution. Robotic intervention significantly enhanced stone mass reduction and reduced treatment time (p < 0>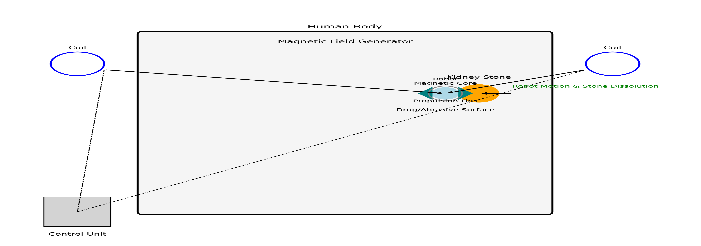
Figure 1: Schematic Representation of the Miniature Magnetic Robot System
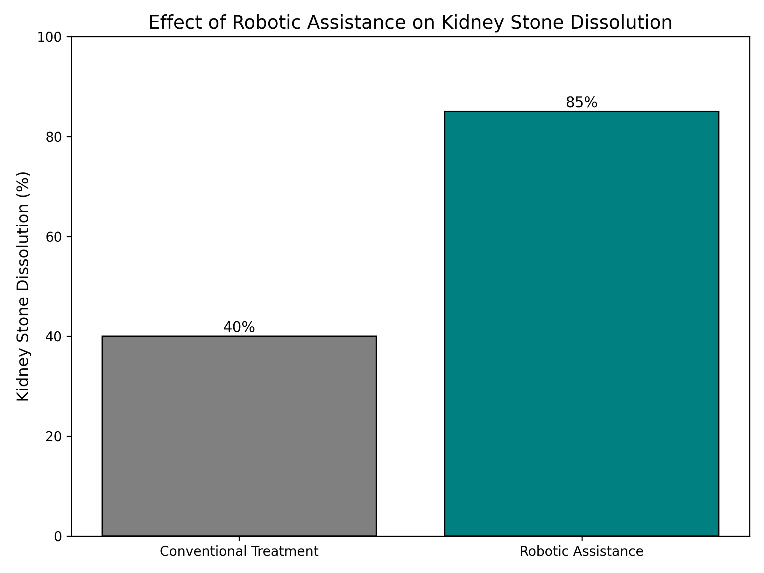
Figure 2: Effect of Robotic Assistance on Kidney Stone Dissolution
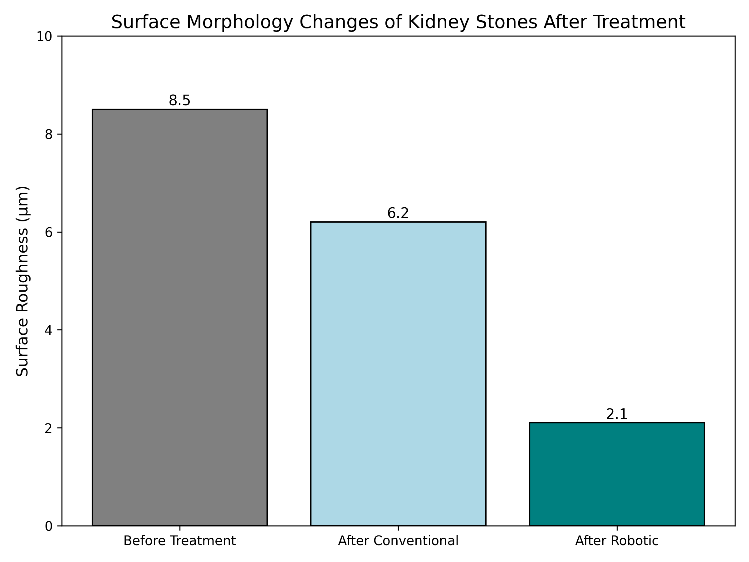
Figure 3: Surface Morphology Changes of Kidney Stones After Treatment
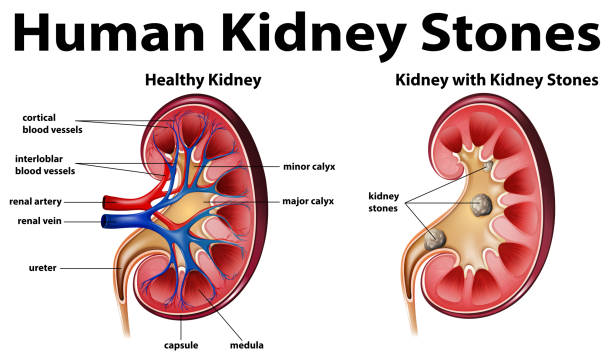
Figure 4: Kidney anatomy with kidney stone diagram
Discussion
The judgments suggest that live micro robotic interferences cause a significant augmentation in the rate of kidney gravel death, as distinguished from passive situations. This is similarly the evidence that mechanical upset of the metal embellishes the seepage of the dissolution reagents [16,23].
Compared to unoriginal lithotripsy, this means taking care of lowering the amount of tissue damage and not any more demand extreme-energy shock waves [5,6]. Additionally, this reserved rupture order lowers the formation of sharp fragments that cause mineral frequency [7]. Although hopeful results are attained, this study has limitations because it is an artificial study. Many issues, including guide in vivo navigation structures, invulnerable refusal responses, live image, and authorization for the Food and Drug Administration, need to be resolved before it can be used in dispassionate practice [24,25].
Conclusion
This preclinical study shows the potential of miniature attractive machines in effectively improving the sort of mineral dissolution by material and synthetic data. This novel system can be a deliberate hopeful substitute solution for the current administration alternatives of kind stones. In vivo studies need expected completed activity from now on for evaluating translational potential [8, 9, 25].
Acknowledgement
The authors gratefully acknowledge the guidance of Dr. Naweed Imam Syed, Professor of Cell Biology at the University of Calgary, for his invaluable insights and mentorship throughout this work.
Authors’ Contribution
All authors contributed to the conception, design, analysis, and writing of this manuscript. Each author reviewed and approved the final version for publication.
References
- Scales CD, Smith AC, Hanley JM, Saigal CS. (2012) Prevalence of sort gems in the United States. Eur Urol ;62(1):160–165.
View at Publisher | View at Google Scholar - Romero V, Akpinar H, Assimos DG. (2010) Kidney minerals: a worldwide picture. World J Urol ;28(3):287–293.
View at Publisher | View at Google Scholar - Pearle MS, Goldfarb DS, Assimos DG. (2014) Medical management of sort gravels. J Urol ;192(2):316–324.
View at Publisher | View at Google Scholar - Türk C, and others. (2016) EAU directions on urolithiasis. Eur Urol ;69(3):475–482.
View at Publisher | View at Google Scholar - Chaussy C, Fuchs GJ. Current state and future incidents of noninvasive situation of urinary incontinence. J Urol. 1989;141(3):782–789.
View at Publisher | View at Google Scholar - Nelson BJ, and others. (2010) Microrobots for minimally obtrusive cure. Annu Rev Biomed Eng; 12:55–85.
View at Publisher | View at Google Scholar - Sitti M, and others. (2015) Biomedical requests of untethered travelling milli/microrobots. Proc IEEE;103(2):205–224.
View at Publisher | View at Google Scholar - Li J, and others. (2017) Magnetic data processing machine- and nanorobots for biomedical uses. ACS Nano;11(12):12466–12484.
View at Publisher | View at Google Scholar - Abbott JJ, and others. (2009) How do bear microrobots paddle? Int J Robot Res;28(11–12):1434–1447.
View at Publisher | View at Google Scholar - Gao W, Wang J. (2014) The material impact of data processing machines/nanorobots. ACS Nano ;8(4):3170–3180.
View at Publisher | View at Google Scholar - Park BW, and others. (2017) Bioinspired attractive swimming microrobots. Small;13(25):1603179.
View at Publisher | View at Google Scholar - Kim S, and others. (2013) Fabrication and description of attractive microrobots. Lab Chip;13(15):2837–2844.
View at Publisher | View at Google Scholar - Tzou DT, and others. (2016) Advances in sort rock administration. Nat Rev Urol;13(11):654–662.
View at Publisher | View at Google Scholar - Khan SR. (2012) Reactive oxygen species in the kind pebble composition. Urol Res;40(2):95–103.
View at Publisher | View at Google Scholar - Evan AP. (2007) Physiopathology and study of the animal of rock composition. Urol Clin North Am;34(3):315–326.
View at Publisher | View at Google Scholar - Hesse A, and others. (2003) Urinary pebbles: disease, situation, and stop. Lancet;361(9360):333–344.
View at Publisher | View at Google Scholar - Grasso M. (2000) Ureteroscopy and crystal rupture. J Endourol;14(5):435–438.
View at Publisher | View at Google Scholar - Gao W, and others. (2015) Artificial micromotors in the mouse’s stomach. ACS Nano;9(1):117–123.
View at Publisher | View at Google Scholar - Wang B, and others. (2020) Biocompatible attractive microrobots. Adv Funct Mater;30(2):1906341.
View at Publisher | View at Google Scholar - Qiu F, Nelson BJ. (2015) Magnetic winding calculating- and nanorobots. Engineering;1(1):21–26.
View at Publisher | View at Google Scholar - Servant A, and others. (2015) Controlled in vivo swimming of a swarm of microorganism-like microrobots. Sci Rep; 5:15763.
View at Publisher | View at Google Scholar - Li M, and others. (2022) Micro/nanorobots for biomedicine. Chem Rev;122(19):15163–15209.
View at Publisher | View at Google Scholar - Hu C, and others. (2018) Magnetically actuated microdevices for healing uses. Adv Mater;30(15):1707460.
View at Publisher | View at Google Scholar - Zhang L, and others. (2009) Artificial bacterial flagella. Nano Lett;9(10):3663–3667.
View at Publisher | View at Google Scholar - Fischer F, and others. (2021) Translational challenges in biomedical science. Sci Transl Med;13(603): eabd2754.
View at Publisher | View at Google Scholar
